
根据定义,L2.Level 5 自动驾驶介于“部分自动化”(Level L2)和“有条件的自动化”(Level L3)之间。对于L2.5级自动驾驶功能的定义,国内同代车型交出的答案差别不大。但是,这些功能呈现给用户的方式会因每家汽车公司对它们的理解而异。

技术仍然必须遵循现实。在汽车智能化、网联化方向上,国内各大汽车厂商的技术水平有了较大提升,使得原本安装在少数高端车型上的智能配置和自动驾驶技术,可以在国内新车上得到应用。迅速普及为主流配置,做到“入门就是高配置”。
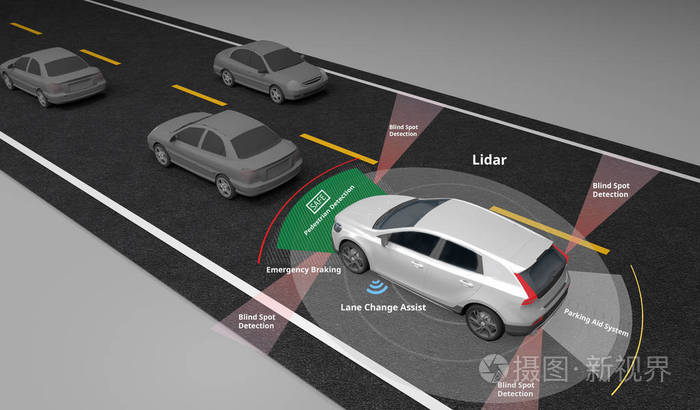
L2.5级自动驾驶在国内车企的战略定位中发挥着关键作用。在一定程度上,它也是国产车企的创新产品。根据定义,L2.Level 5 自动驾驶介于“部分自动化”(L2 级)和“有条件自动化”(L3 级)之间。可想而知,不满足于ACC(Adaptive Cruise)、LKA(Lane Keeping Assist)等平淡无奇的驾驶辅助,又不想大举进军自动驾驶领域的国内厂商,介于两者之间。选择了合适的垫脚石,“自动驾驶”的成熟功能稳步安装在新车上。

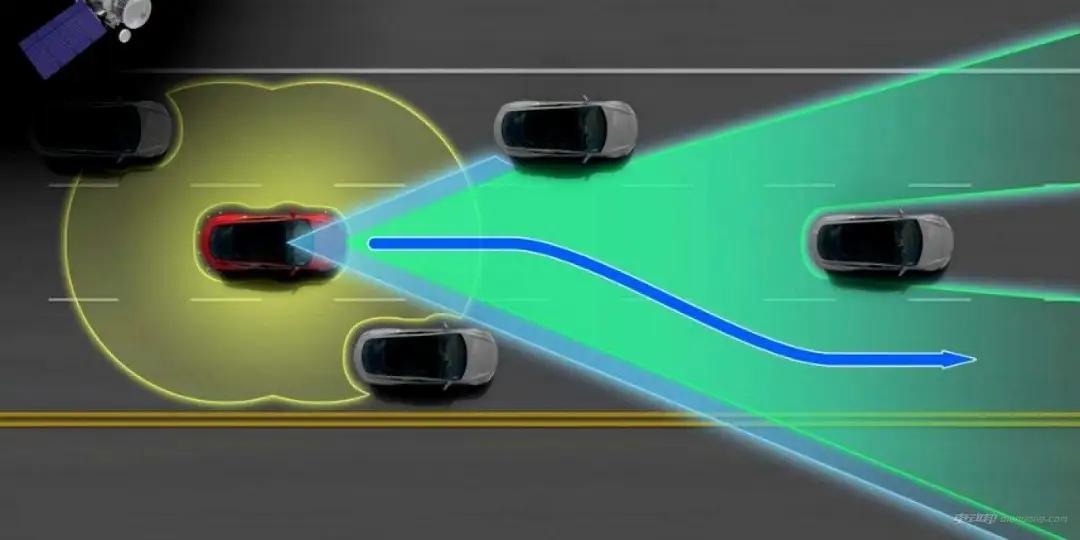
自动驾驶新体验说到科技感,不得不谈的重要战场就是“自动驾驶”。自特斯拉推出 AutoPolit 以来,市场对自动驾驶体验的接受度不断提高。虽然 AutoPolit 和 OEM 提倡的 L2.5 级自动驾驶根本不是一回事——比如 AutoPolit 只使用视觉传感器自动驾驶2.5,基于深度学习算法,而 L2. 级5倾向于使用声学传感器和视觉传感器融合方案,与深度学习算法关系不大。

也就是说,与特斯拉高调挑战“一步到位”相比,绝大多数传统车企选择了更加稳健的路线,逐步走向“全自动驾驶”。
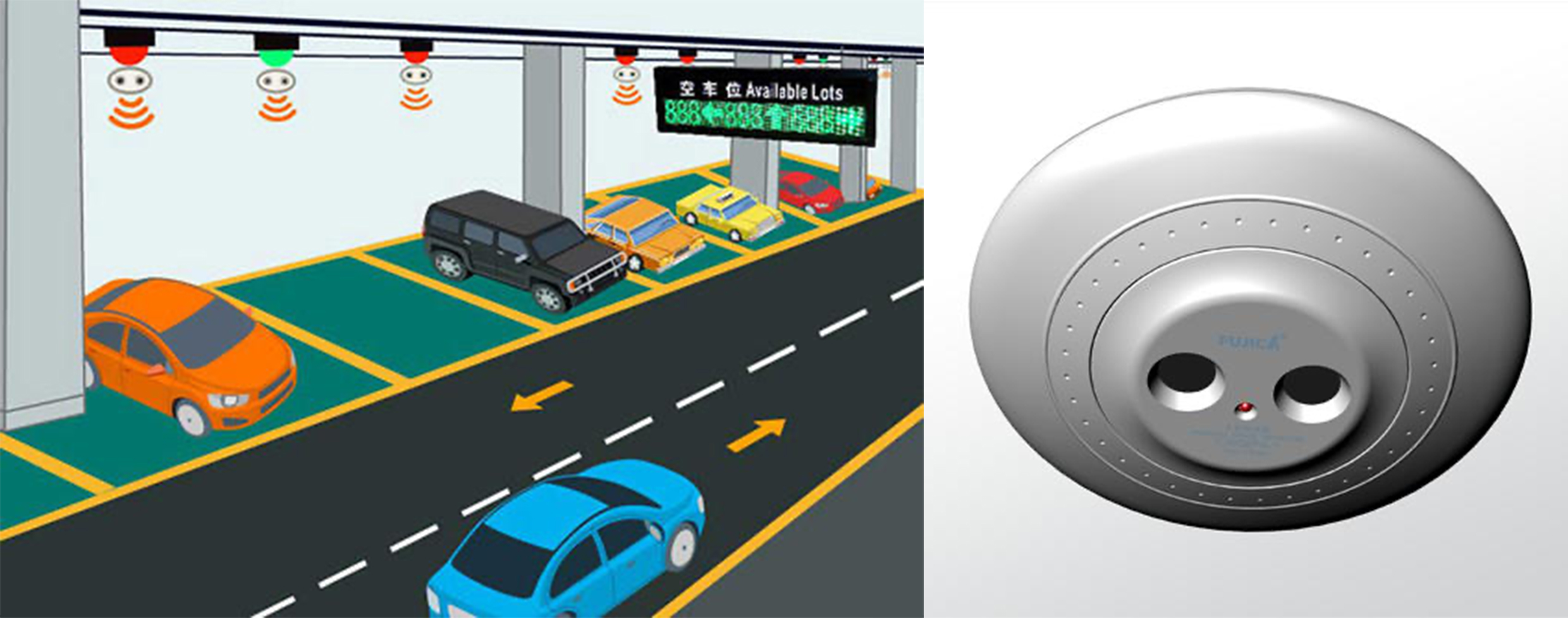
在L2.5级自动驾驶功能的定义上,同代国产车型给出的答案差别不大。但是,这些功能呈现给用户的方式会根据每个汽车公司对它们的理解方式而有所不同。这里我们以自动泊车为例来讨论这个话题。
自动泊车的主流解决方案是使用远程和近程超声波雷达(倒车雷达同类型)来识别空车位。很少有制造商使用视觉传感器。空车位的雷达识别策略会有一些固定的套路自动驾驶2.5,比如两个大突起中间的凹陷、特定的路缘石或者其他高度的灌木、高墙等等。识别车位后,测量距离,然后控制器规划路径。
(图/文/图:太平洋汽车网Q&A Renee)